
2025 FIRST® REEFSCAPE: CALYPSO

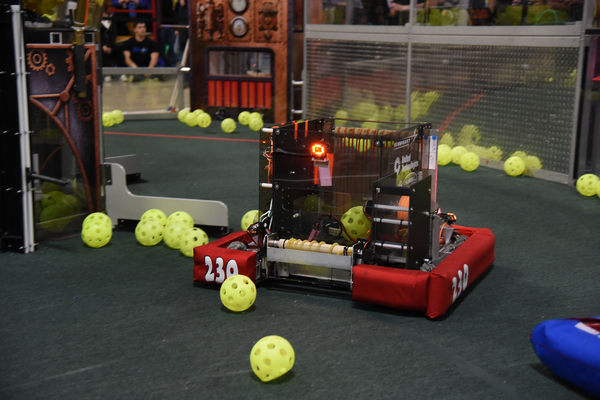
2024 FIRST® CRESCENDO: STACCATO
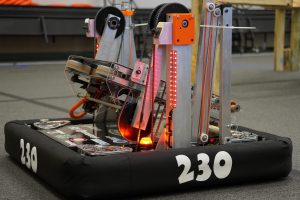
Calypso used an SDS Swerve module with two motors on each wheel: one for steering and one for power. Its three stage cascade elevator allowed its coral and algae intakes to score on all levels. Its algae intake could pick up algae off the ground, allowing Calypso to have a wide range of scoring: in both the processor and the barge. It’s donut style climber allowed it to deep climb on the cage. Calypso was also able to score three pieces of coral on the fourth level during auto.
Staccato used an SDS Swerve module with two motors on each wheel, one for steering and one for power. It could pick up notes with a flat over-the-bumper floor pickup that used a combination of rollers and wheels to intake the notes. The arm moved forward and the note came out of the other side of the intake for use when the robot would shoot it into the amp or speaker. Our robot was able to climb the stage and score a note in the trap. Also, were able to perform an accurate 4-piece and an accurate 4.5-piece during our autonomous period.
2023 FIRST® CHARGED UP: CLAMPS

Clamps used an SDS Swerve module with two motors on each wheel, one for steering and one for power. It could pick up pieces with a telescopic arm that rotated on a pivot. Down at the bottom, there was a wrist that could move up and down with a claw at the end. It was consistently able to place either cone on any of the three levels of the community, and it could balance on the charge station well. We could consistently score two game pieces and park during our autonomous period.
2022 FIRST® RAPID REACT: HAWKEYE

Hawkeye used a tank drive with traction wheels. The robot picked up the game pieces over the bumper and indexed the balls via a belt to the shooter. The shooter could adjust its angle, as it utilized a flywheel with a counter-spin to keep cargo from bouncing out. The climber used hooks to extend to the next rung of the hangar and then pulled itself up using a winch. Hawkeye was able to get 5 balls into the lower hub during the autonomous period and consistently scored in the upper hub throughout the whole match.
We love talking about this one.
2021 FIRST® INFINITE RECHARGE: TALON XIX

This robot was equipped with a robust tank drive to avoid getting pushed around. It used a pneumatic intake to pick up the power cells. The revolving “death star” indexed the balls up to the rotating turret, which could shoot from any angle. The climber used an elevator to bring a hook to the bar and a winch to bring it back down.
We do not talk about this one.
2019 FIRST® DEEP SPACE: Gaelien

Gaelien is outfitted with a single simple mechanism that works to pick up and place both of this game’s pieces. The elevator on the intake/placer allows the robot to put game pieces in any of the designated scoring areas, and the mecanum drive train allows it to cycle quickly. The climber also utilizes the central moving mechanism to push itself up onto the platform.
This is one of three robots that still exists to this day. We use it in various outreach events, like the DECA Fashion Show.
2018 FIRST® POWER UP: CLYDE

Clyde was equipped with a mecanum drive train, allowing the robot to move across the arena fast. This worked well for its pickup mechanism, which was able to collect cubes on any side of it while maintaining a tight grip. Clyde also had an elevator which allowed the robot to raise the pickup mechanism to drop cubes on the scale. The final addition was the climber, which the robot utilized to climb from the center or side of the rung, making Clyde a flexible robot with other teams.
2017 FIRST® STEAMWORKS: TALON XVIII
Talon XVIII, has been outfitted with a mecanum drive system. One ability gained from the four wheel drive is that when placing gears, our robot is able to move left to right efficiently. The robot’s maneuverability is also intensified by the drive system, which increases the top speed. Other forms of offensive mechanisms have been constructed and equipped to Talon. A quick and accurate gear mechanism was added after multiple revisions. Once a gear is acquired, our robot is quite a formidable opponent, achieving up to 6 gears a match. On the fuel-launching front, the robot has an efficient and very quick pickup mechanism. Due to the look of the pickup mechanism, we were able to incorporate our team color orange along with lights on the sides. The last add-on to the robot is the climber. This mechanism allows the robot to climb the rope very quickly.
2016 FIRST® STRONGHOLD: TALON XVII

Talon XVII has a drive train with 6 pneumatic wheels and center drop. The floor intake is folded up and down to help go over defense. It has a carbon fiber catapult that can fire boulders from all positions in the courtyard with a 90% accuracy per match using our own vision targeting system.
2015 RECYCLE RUSH: TALON XVI

Talon XVI was a stacking robot that used a mecanum wheel drive as well as pnuematics. It won three blue banners and won every district, except district championships. A maximum of 5 totes could be picked, but variations are also possible such as 3 or just 1 in a grab. There were also five autonomous modes for these pickups.
2014 AERIAL ASSIST: TALON XV

The Talon XV, a defensive orientated robot, has been outfitted with a six wheel drive system, giving it agility and maneuverability. When push comes to shove, our robot is able to effectively stand its ground. Down-riggers have been installed to foil any attempt by our rivals to push us around during the game, creating a formidable opponent to others. Rotating antennas dubbed, “Loki’s Horns” in accordance to this year theme, hold the ball in place and move it into a scoop. Additionally, the similarly-named, “Hammer of Thor” is released and hits the ball, which launches it forcefully at the target. In a pinch, the pusher mounted at the front of the robot can push both opposing robots and balls away.
2013 ULTIMATE ASCENT: TALON XIV

Talon XIV has a total of five frisbees that can be held by the shooter and shot at high speeds to any designated goals. The shooter is also capable of shifting up and down to enhance accuracy and widen points range. Talon XIV also consists a device dubbed the, “Flyswatter”, which blocks the goals to force full court shooters out from their anchored positions. Talon utilizes a three-hook system where one hook grabs the bar and pulls the robot up, while the other two hooks hold the robot in place.
2012 REBOUND RUMBLE: TALON XIII

The latest edition to the Gaelhawks’ lineup, the Talon XIII, faced the challenge of launching basketballs into hoops. With the light sensor system, the backboards of the hoops could be detected, ensuring a perfect aim to gain points. With a two-wheeled shooter allowing for a variety of speeds, the robot was able to quickly and accurately adjust its shot. A pivoting swivel device gave it 180° turning and a six wheel drive and our drive system could help other robots climb the ramp.
2011 LOGO MOTION: TALON XII

Talon XII features a 4-wheel mecanum drive and a gyroscopic stabilization system. It utilizes an extending arm which has a range of motion of 140° and a height of 9 feet. It can score on any row of pegs as well as reach behind and grab game pieces from the feeder without having to turn around. Its claw features a unique roller system which works in reverse to hold game pieces in place. If the game piece begins to slip, a switch is deactivated and automatically activates the rollers again for a readjustment. Talon XII also contains a minibot that is deployed via a pneumatic arm, which swings out from the front left corner of the robot. Once deployed, the minibot maintains its grip on the pole with a powerful neodymium magnet and can climb to the top of the 9 foot tower in under 4 seconds.
2010 BREAKAWAY: TALON XI

The Talon XI has a low center of gravity and uses a mecanum drive for better maneuverability and handling of game balls. A pneumatic suction provides the ability to grab and move with the ball. The kicking mechanism is a powerful combination of pneumatics and elastics that can kick the balls from one end of the field to the other (a 30 ft distance). There is a grappling arm which can hoist the robot’s entire 120 pound body into the air on the bar at the end of a match.
2009 LUNACY: TALON X

The new Talon X is fitted with a spinning bumper frame, giving it strong defense without hindrances to its speed and agility. Additionally, several sensors on the Talon X coupled with a gyro allow the robot to drive along the wall in autonomous, picking up an empty cell right away. The goal of the game was to score points by collecting “Moon rocks”, and the Talon X’s trailer is equipped to hold ten moon rocks. As an offensive measure, the spinning, “Whopper” sends game pieces into opposing robots’ trailers. With multiple ultrasonic sensors, the similar “Whopper Jr.” obtains and delivers empty cells to outposts by spinning backwards and moving them from the payload specialist into the outpost hole.
2008 FIRST® OVERDRIVE: TALON IX

The Talon IX was tasked with scoring as many points as possible by launching balls over a bar known as the, “Overpass”. Using a pneumatic-powered lift and dump, the agile Talon IX was able to quickly pick up the trackballs and launch the ball over the overpass. Additionally, the robot was able to defend against opposition by launching opponent’s trackballs from the overpass forward or backwards, essentially descoring their points. The Talon IX also was capable of placing balls on the overpass for endgame scoring. In its complex autonomous mode, the bot was able to knock off trackballs of opposing teams off of the overpass.
2007 RACK ‘N ROLL: TALON VIII

The Talon VIII was created with the purpose of lifting and holding two other robots twelve inches off of the floor. To accomplish such a challenge, it was equipped with five foot, “Wings” on either side of the structure. The wing ramps, powered by passive lift, lowered to allow other robots to move onto it. Once the other robot’s center of mass passed the pivot point of the wings, they were hoisted up twelve inches in the air. A suction-powered arm was built to hold onto ringers and pivots, allowing the robot to reach the top level of ringers. With a six wheel drive train and four omni wheels, the Talon VIII had great traction without the sacrifice of speed and agility.
2006 AIM HIGH: TALON VII

The Talon VII, an R2D2-like robot, was challenged with scoring the most points as possible by shooting balls from a turret into a high goal or pushing them into a low goal. The spinning turret, inspired by a football launcher, was loaded by an auto-loading system and accurately fired the balls into the goal. Using its two speed CIM motor powered launcher and CMU camera, the Talon VII scored a multitude of goals, especially during its autonomous mode.
2005 TRIPLE PLAY: TALON VI

Team 230’s Triple Play robot was one of the more effective “Dumpers” of the season. Design to load and cap several tetras at once it was an effective strategy during the regular season. Along with a reliable autonomous mode that capped a goal every time and the rapid man-machine interaction of quickly loading the tetras it seemed to be an unstoppable force. Even management in lofty Manchester, NH were impressed. In the end however the more nimble crane-type robots were able to leverage the end-game and out-cap and out-tic-tac-toe our Dumper. An alliance of 3 dumpers verses 3 cranes in the our Atlanta quarter finals we utterly out classed.
Talon VI was robust. It could and did take a lot of punishment in these pre-bumper competitions. Its 4 wheel tank-drive system fronted by omni-wheels was highly maneuverable and fit the game appropriately. The scissor lift base to raise the tetras to dumping height was stable and quick and the pneumatic assisted dumper itself was fast and strong
2004 FIRST® FRENZY: TALON V

This machine had an automatic 2 speed transmission and a custom wheel encoder built from Banner optical sensors. It had the ability to climb on the platform and hang from the bar in autonomous,
The 2004 robot was a single purpose matching built to hang fast and reliably. All other attempts to enhance functionality such as manipulating both small and big balls were abandoned during the build season. For this year it was the right decision since the Gaelhawks took home the championship in Connecticut.
The custom notched wheels helped with climbing the platform and the pneumatic tires gave the traction necessary to do it.
2003 STACK ATTACK: TALON IV

The 230 Stack Attack robot started out as an extremely elegant design. Designed to be low profile so it could cross under the bar separating the field zones without relying on the ramp. The main mechanism was the stacker. Arms would extend and grab a container and load it onto its back. When four containers were loaded the bed would lift dump truck style leaving a stack in its wake.
With a standard drive train that was nothing special 230 couldn’t keep up this season when the game changed from building to bashing stacks. Modifications were made during the season, replacing the dumper with a shield, were too little and too late.
2002 ZONE ZEAL: TALON III

In 2002 Team 230 continued with the theme off specializing in doing one task well rather than trying to do it all. In this competition one of the major activities was moving large, heavy goals to your scoring zone on the field.
230’s simple design was to capture two quickly right at the beginning. It’s “talons”, modified carabiner claws, would not let go once latched. Pneumatic assisted feet once deployed assured that no one else could move 230 or their goals down field.
With the addition of the two scissor scoring “gates” 230 had a competitive robot this year and missed Einstein by inches
2001 DIABOLICAL DYNAMICS: TALON II

Dubbed the “Big Ball Robot” Team 230’s 2001 entry was designed for this specialty. After a disastrous season the previous year the concentration was on KISS, “Keep It Simple Silly”. Reliability, durability, and the ability to contribute positively to the alliance.
Diabolical Dynamics put four robots on the same side during a match so cooperation was a key element. 230’s main focus was lifting the large medicine balls on top of the goals. And although we had a secondary systems for goal handling most of practice went towards handling the big balls.
From all the lessons learned the previous year our drive train, 4 wheel, chain driven, tank style, was well build. This robot would become our main demonstration robot for years to com
2000 CO-OPERATION FIRST: TALON

For the 1999-2000 competition Team 230 decided to take our level of engineering excellence up a notch. With a welded frame, a roller based ball gathering mechanism, an awesome arm dual purposed as a scoring and hanging mechanism we considered ourselves at the top of our game.
For Team 230 this year proved to be quite a learning experience. A sophisticated mechanism was designed around a venturi vacuum system to suck up the balls, hold them in in our arm, and score. An impeller was manufactured out of aluminum angle and encased in Lexan driven by a Fisher Price motor. This proved to be an effective but highly illegal according to the rules of this competition method of gathering balls. Once we discovered this prompted an all night re-design the day before ship.
Team 230 also discovered that welding aluminum is very difficult. There were several broken welds repaired during the season. We also discovered that side loads on certain electric motors do make a significant difference. Our direct drive drill motor transmission moved the robot very little before the breakers were tripped.
Valuable lessons were learned this year. From our failures we emerged a better team.
1999 DOUBLE TROUBLE: DR. KLAW


“Dr. Klaw” was constructed during Team 230’s freshman year during the 1998-1999 season. The Team known as MAD, before the Gaelhawks moniker hit the scene, built an indestructible machine. It sported a welded steel frame propelled by two direct drive van door motors that achieved an impressive 4 feet per second speed. The crowning achievement that contributed to its UTC New England Regional Rookie All Star award was a simple but elegant “scoop” that lifted “floppies”, the game piece of this year, into an basket that it carried on its back. Bonus points were achieved by a lift mechanism that elevated the floppies above six feet. This was most likely one of the most successful scissor-lift mechanisms in FIRST® history.
Steering was achieved by counter rotating the two direct drive wheels with castors in the front. An addition element of the game required the robot to climb a “puck” in the end game for more points. Team 230’s solution was mounting the castor wheels on a collapsible frame. Dr. Klaw beached itself on the puck and lifted its drive wheels with a speed screw powered by a Fisher Price motor.
Affectionately known as the “Mud Duck” by the team for its lumbering speed and indestructible frame, Dr. Klaw got its name from a hook mechanism that was attached to a rotating claw powered by a second Fisher Price motor that was designed to grab the puck on one of the three inch steel pipes attached to it. Teams that moved the puck into their side of the field got additional points.
Dr. Klaw served the team well. Team 230 was in the elimination matches both in Hartford and the Championships that year.